Publications
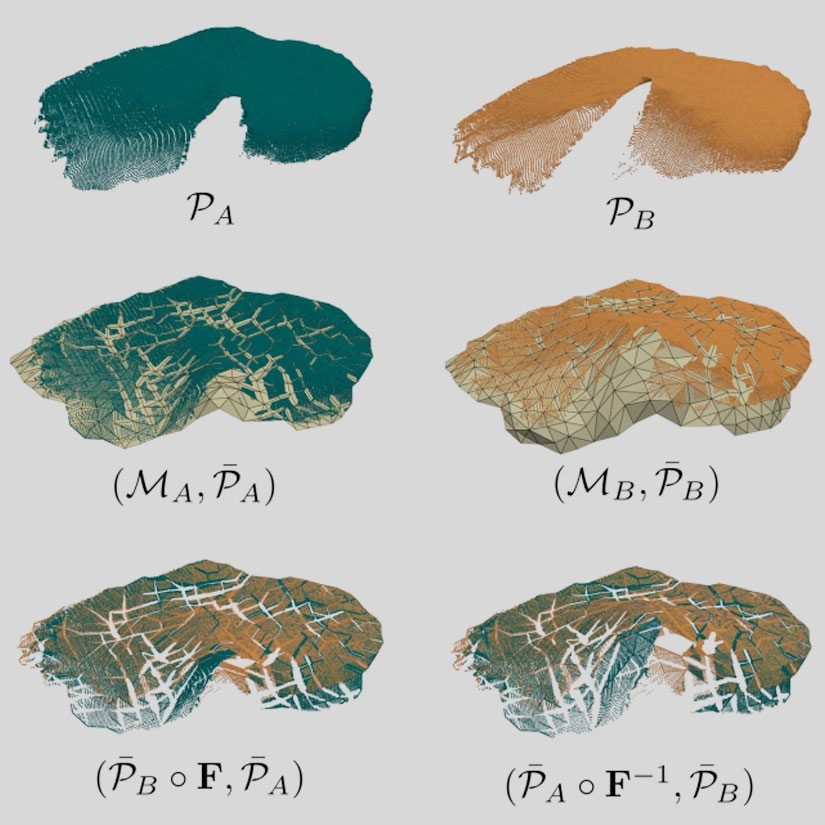
SuPerPM: A Large Deformation-Robust Surgical Perception Framework Based on Deep Point Matching Learned from Physical Constrained Simulation Data
S Lin, AJ Miao, A Alabiad, F Liu, K Wang, J Lu, F Richter, MC Yip
Accepted in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024.

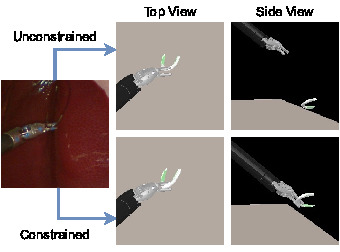
SURESTEP: An Uncertainty-Aware Trajectory Optimization Framework to Enhance Visual Tool Tracking for Robust Surgical Automation
NU Shinde*, ZY Chiu*, F Richter, J Lim, Y Zhi, S Herbert, MC Yip
Accepted in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024.
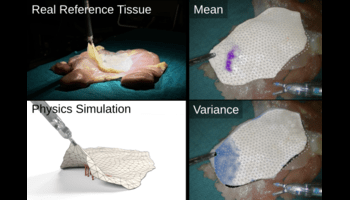
JIGGLE: An Active Sensing Framework for Boundary Parameters Estimation in Deformable Surgical Environments
NU Shinde*, X Liang*, F Liu, Y Zhang, F Richter, S Herbert, MC Yip
Accepted in Robotics: Science and Systems (RSS), 2024.
BAA-NGP: Bundle-Adjusting Accelerated Neural Graphics Primitives
S Liu, S Lin, J Lu, S Saha, A Supikov, M Yip
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pp. 850-857 (2024).
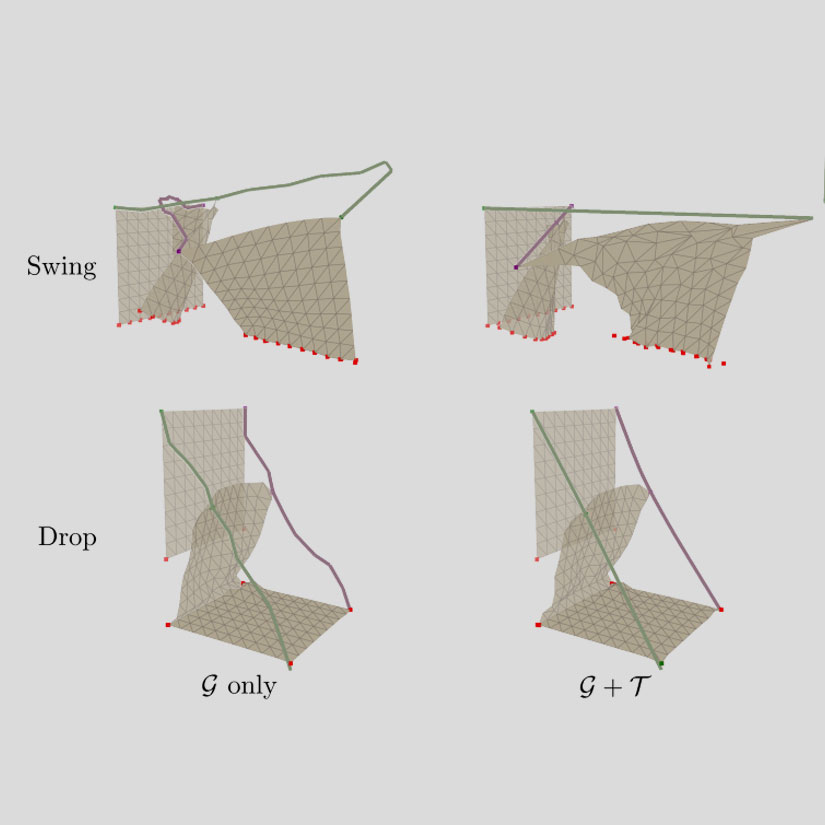
Achieving Autonomous Cloth Manipulation with Optimal Control via Differentiable Physics-Aware Regularization and Safety Constraints
Y Zhang, F Liu, X Liang, M Yip
Accepted in IEEE International Conference on Robotics and Automation (ICRA), 2024.
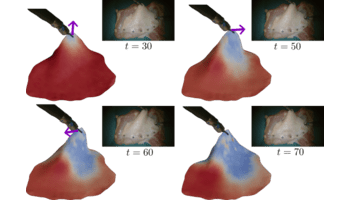
Real-to-Sim Deformable Object Manipulation: Optimizing Physics Models with Residual Mappings for Robotic Surgery
X Liang, F Liu, Y Zhang, Y Li, S Lin, M Yip
Accepted in IEEE International Conference on Robotics and Automation (ICRA), 2024.

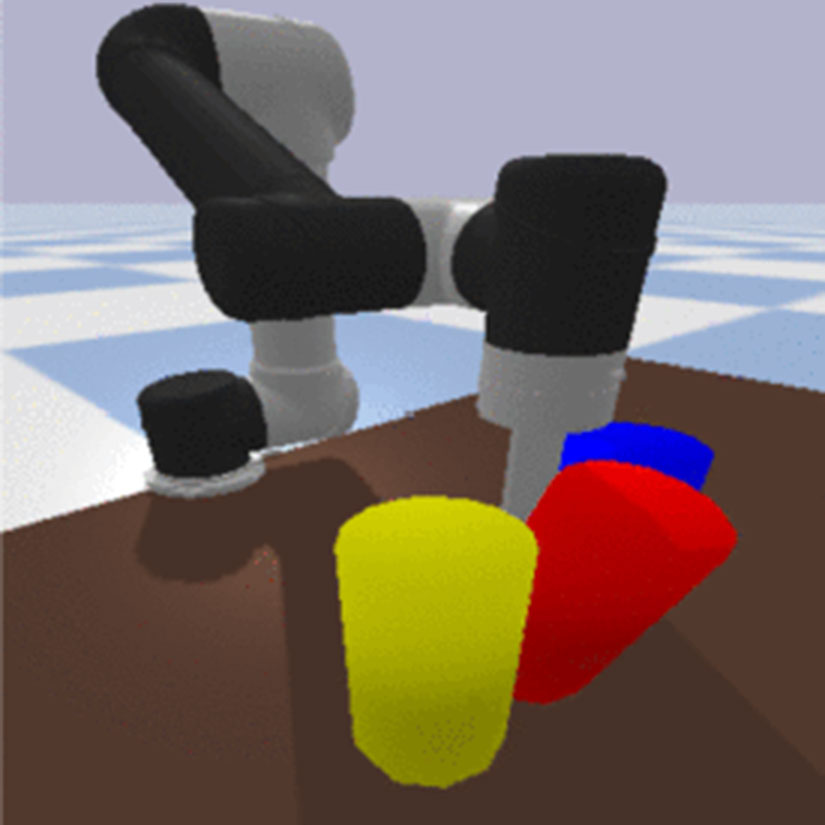
Flexible Attention-Based Multi-Policy Fusion for Efficient Deep Reinforcement Learning
ZY Chiu*, YL Tuan*, WY Wang, MC Yip
Advances in Neural Information Processing Systems (NeurIPS), 36, pp. 13590-13612 (2024).
Learning Sampling Dictionaries for Efficient and Generalizable Robot Motion Planning with Transformers
JJ Johnson, AH Qureshi, MC Yip
IEEE Robotics and Automation Letters (RA-L), 2023.

Finding Biomechanically Safe Trajectories for Robot Manipulation of the Human Body in a Search and Rescue Scenario
E Peiros*, ZY Chiu*, Y Zhi, N Shinde, MC Yip
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 167-173 (2023).
AnyOKP: One-Shot and Instance-Aware Object Keypoint Extraction with Pretrained ViT
F Qin, T Hou, S Lin, K Wang, MC Yip, S Yu
arXiv preprint arXiv:2309.08134.
Object-centric Representations for Interactive Online Learning with Non-Parametric Methods
NU Shinde, J Johnson, S Herbert, MC Yip
IEEE International Conference on Automation Science and Engineering (CASE), pp. 1-6 (2023).
Artificial intelligence meets medical robotics
M Yip, S Salcudean, K Goldberg, K Althoefer, A Menciassi, JD Opfermann, A Krieger, K Swaminathan, CJ Walsh, H Huang, IC Lee
Science 381 (6654), pp. 141-146 (2023).

Suture Thread Spline Reconstruction from Endoscopic Images for Robotic Surgery with Reliability-driven Keypoint Detection
N Joglekar, F Liu, R Orosco, M Yip
IEEE International Conference on Robotics and Automation (ICRA), pp. 4747-4753 (2023).
Mobility Analysis of Screw-Based Locomotion and Propulsion in Various Media
J Lim*, C Joyce*, E Peiros, M Yeoh, PV Gavrilov, SG Wickenhiser, DA Schreiber, F Richter, MC Yip
IEEE International Conference on Robotics and Automation (ICRA), pp. 7317-7323 (2023).
Real-Time Constrained 6D Object-Pose Tracking of An In-Hand Suture Needle for Minimally Invasive Robotic Surgery
ZY Chiu, F Richter, MC Yip
IEEE International Conference on Robotics and Automation (ICRA), pp. 4761-4767 (2023).
Design and Mechanics of Cable-Driven Rolling Diaphragm Transmission for High-Transparency Robotic Motion
HM Lam, WJ Walker, L Jonasch, D Schreiber, MC Yip
IEEE International Conference on Robotics and Automation (ICRA), pp. 7338-7344 (2023).

Image-based Pose Estimation and Shape Reconstruction for Robot Manipulators and Soft, Continuum Robots via Differentiable Rendering
J Lu*, F Liu*, C Girerd, MC Yip
IEEE International Conference on Robotics and Automation (ICRA), pp. 560-567 (2023).
Mobility Analysis of Screw-Based Locomotion and Propulsion in Various Media
J. Lim, C. Joyce, E. Peiros, M. Yeoh, P. V. Gavrilov, S. G. Wickenhiser, D. A. Schreiber, F. Richter, M. C. Yip
IEEE International Conference on Robotics and Automation (ICRA), pp. 7317-7323 (2023).
Semantic-SuPer: A Semantic-aware Surgical Perception Framework for Endoscopic Tissue Identification, Reconstruction, and Tracking
S Lin, AJ Miao, J Lu, S Yu, ZY Chiu, F Richter, MC Yip
IEEE International Conference on Robotics and Automation (ICRA), pp. 4739-4746 (2023).

ORRN: An ODE-based Recursive Registration Network for Deformable Respiratory Motion Estimation With Lung 4DCT Images
X Liang, S Lin, F Liu, D Schreiber, M Yip
IEEE Transactions on Biomedical Engineering, 70(12), pp.3265-3276 (2023).
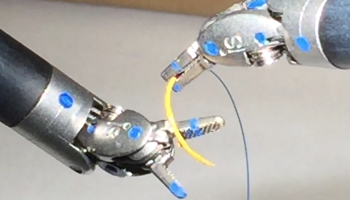
Robotic manipulation of deformable rope-like objects using differentiable compliant position-based dynamics
F Liu, E Su, J Lu, M Li, MC Yip
IEEE Robotics and Automation Letters, vol. 8, no. 7, pp. 3964-3971 (2023).

Markerless Suture Needle 6D Pose Tracking with Robust Uncertainty Estimation for Autonomous Minimally Invasive Robotic Surgery
ZY Chiu, AZ Liao, F Richter, B Johnson, MC Yip
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 5286-5292 (2022).
Robotic Tool Tracking under Partially Visible Kinematic Chain: A Unified Approach
F. Richter, J. Lu, R. K. Orosco, M. C. Yip
Configuration Space Decomposition for Scalable Proxy Collision Checking in Robot Planning and Control
M Verghese, N Das, Y Zhi, M Yip
Pose Estimation of Robot Manipulators via Keypoint Optimization and Sim-to-Real Transfer
J. Lu, F. Richter, M. C. Yip
Parameter Identification and Motion Control for Articulated Rigid Body Robots Using Differentiable Position-based Dynamics
F Liu, M Li, J Lu, E Su, MC Yip
Differentiable Robotic Manipulation of Deformable Rope-like Objects Using Compliant Position-based Dynamics
F Liu, E Su, J Lu, M Li, MC Yip
Remote telesurgery in humans: a systematic review
P Barba, J Stramiello, EK Funk, F Richter, MC Yip, and RK Orosco.
DiffCo: Autodifferentiable Proxy Collision Detection With Multiclass Labels for Safety-Aware Trajectory Optimization
Zhi, Yuheng, Nikhil Das, Michael Yip
Autonomous navigation in unknown environments with sparse bayesian kernel-based occupancy mapping
T Duong, M Yip, N Atanasov
Crane: a 10 degree-of-freedom, tele-surgical system for dexterous manipulation within imaging bores
D Schreiber, Z Yu, H Jiang, T Henderson, G Li, J Yu, R Zhu, AM Norbash, MC Yip
Mixed reality surgical mentoring of combat casualty care related procedures in a perfused cadaver model: Initial results of a randomized feasibility study
MD Tadlock, EJ Olson, D Gasques, R Champagne, MJ Krzyzaniak, SA Belverud, V Ravindra, J Kerns, PM Choi, J Deveraux, J Johnson, T Sharkey, M Yip, N Weibel, K Davis
BASED: Bundle-Adjusting Surgical Endoscopic Dynamic Video Reconstruction using Neural Radiance Fields
S Saha, S Liu, S Lin, J Lu, M Yip
Artifacts Mitigation in Sensors for Spasticity Assessment
Ç Yalçın, M Sam, Y Bu, M Amit, AJ Skalsky, M Yip, TN Ng, H Garudadri
Scalable tactile sensor arrays on flexible substrates with high spatiotemporal resolution enabling slip and grip for closed-loop robotics
H. Oh, G.C. Yi, M.C. Yip, S.A. Dayeh
Compensatory motion scaling for time-delayed robotic surgery
R.K. Orosco, B. Lurie, T. Matsuzaki, E.K. Funk, V. Divi, F.C. Holsinger, S. Hong, F. Richter, N. Das, M. C. Yip
Autonomous Robotic Suction to Clear the Surgical Field for Hemostasis using Image-based Blood Flow Detection
F. Richter, S. Shen, F. Liu, J. Huang, E.K. Funk, R.K. Orosco, M.C. Yip
MPC-MPNet: Model-Predictive Motion Planning Networks for Fast, Near-Optimal Planning under Kinodynamic Constraints
L. Li, Y.L. Miao, A.H. Qureshi, M.C. Yip
Data-driven Actuator Selection for Artificial Muscle-Powered Robots
T. Henderson, Y. Zhi, A. Liu, M.C. Yip
SuPer Deep: A Surgical Perception Framework for Robotic Tissue Manipulation using Deep Learning for Feature Extraction
J. Lu, A. Jayakumari, F. Richter, Y. Li, M.C. Yip
Model-Predictive Control of Blood Suction for Surgical Hemostasis using Differentiable Fluid Simulations
J. Huang*, F. Liu*, F. Richter, M.C. Yip
Real-to-Sim Registration of Deformable Soft-Tissue with Position-Based Dynamics for Surgical Robot Autonomy
F. Liu, Z. Li, Y. Han, J. Lu, F. Richter, M.C. Yip
Bimanual Regrasping for Suture Needles using Reinforcement Learning for Rapid Motion Planning
Z.Y. Chiu, F. Richter, E.K. Funk, R.K. Orosco, M.C. Yip
IEEE International Conference on Robotics and Automation (ICRA). Xi'an, China, pp. 7737-7743 (2021).
ARCSnake: Reconfigurable Snake-Like Robot with Archimedean Screw Propulsion for Multi-Domain Mobility
F. Richter*, P. V. Gavrilov* and H. M. Lam* and A. Degani and M. C. Yip
ARTEMIS: A Collaborative Mixed-Reality System for Immersive Surgical Telementoring
D Gasques, JG Johnson, T Sharkey, Y Feng, R Wang, ZR Xu, E Zavala, Y. Zhang, W. Xie, X. Zhang, K. Davis, M. Yip, and N. Weibel
Exobiology Extant Life Surveyor (EELS)
K Carpenter, A Thoesen, D Mick, J Martia, M Cable, K Mitchell, S. Hovsepian, J. Jasper, N. Georgiev, R. Thakker, A. Kourchians, B. Wilcox, M. Yip, and H. Marvi.
Optimal Multi-Manipulator Arm Placement for Maximal Dexterity during Robotics Surgery
M Xu, J Di, N Das, MC Yip
NeRP: Neural Rearrangement Planning for Unknown Objects
AH Qureshi, A Mousavian, C Paxton, MC Yip, D Fox
CRANE: a 10 Degree-of-Freedom, Tele-surgical System for Dexterous Manipulation within Imaging Bores
DA Schreiber, Z Yu, H Jiang, T Henderson, G Li, J Yu, R Zhu, AM Norbash, MC Yip
From Bench to Bedside: The First Live Robotic Surgery on the dVRK to Enable Remote Telesurgery with Motion Scaling
F Richter, EK Funk, WS Park, RK Orosco, MC Yip
Markerless Camera-to-Robot Pose Estimation via Self-supervised Sim-to-Real Transfer
J Lu, F Richter, MC Yip
ARTEMIS: Mixed-Reality Environment for Immersive Surgical Telementoring
N. Weibel, D. Gasques, J. Johnson, T. Sharkey, Z.Q. Robin Xu, X.M. Zhang, M.C. Yip, K. Davis
Autonomous Navigation in Unknown Environments using Sparse Kernel-based Occupancy Mapping
T. Duong, N. Das, M.C. Yip, N. Atanasov
ARCSnake: An Archimedes' Screw-Propelled, Reconfigurable Robot Snake for Complex Environments
D.A. Schreiber*, F. Richter*, A. Bilan**, P.V. Gavrilov**, H. M. Lam**, C.H. Price**, K.C. Carpenter, M.C. Yip;
SuPer: A Surgical Perception Framework for Endoscopic Tissue Manipulation with Surgical Robotics
Y Li, F Richter, J Lu, EK Funk, RK Orosco, J Zhu, MC Yip
Composing Task-Agnostic Policies with Deep Reinforcement Learning
A.H.Qureshi, J.J. Johnson, Y. Qin, T. Henderson, B. Boots, M.C. Yip
Vibration-based Multi-Axis Force Sensing: Design, Characterization, and Modeling
W. Kuang, M.C. Yip, J. Zhang
ARTEMIS: Mixed-Reality Environment for Immersive Surgical Telementoring
N. Weibel, J. Johnson, T. Sharkey, Z. Robin Xu, E. Zavala, K. Davis, D. Gasques, X. Zhang, M.C. Yip
Motion Planning Networks: Bridging the Gap between Learning-based and Classical Planners
A.H Qureshi, Y.L. Miao, A. Simeonov, M.C. Yip
Dynamically constrained motion planning networks for non-holonomic robots
J. J. Johnson, L. Li, F. Liu, A. H. Qureshi, and M. C. Yip
CRANE: A highly dexterous needle placement robot for evaluation of interventional radiology procedures | Best Paper finalist
DA Schreiber, H Jiang, G Li, J Yu, Z Yu, R Zhu, AM Norbash, MC Yip
Adversarial Imitation via Variational Inverse Reinforcement Learning
A.H.Qureshi, B. Boots, M.C. Yip
Motion Scaling Solutions for Improved Performance in High Delay Surgical Teleoperation.
F. Richter, R.K. Orosco, M.C. Yip
Augmented Reality Predictive Displays to Help Mitigate the Effects of Delayed Telesurgery
F. Richter, Y.F. Zhang, Y.H. Zhi, R.K. Orosco, M.C. Yip
Open-Sourced Reinforcement Learning Environments for Surgical Robotics
F. Richter, R. K. Orosco, M.C. Yip
An Open-Source 7-Axis, Robotic Platform to Enable Dexterous Procedures within CT Scanners
D. A. Schreiber, D. B. Shak, A. M. Norbash, M. C. Yip
Robotic Artificial Muscles: Current Progress and Future Perspectives
J. Zhang, J. Sheng, C.T. O'Neill, C. J. Walsh, R. J. Wood, JH. Ryu, J.P Desai, M.C. Yip
Model-free Visual Control for Continuum Robot Manipulators via Orientation Adaptation
M Verghese, F Richter, A Gunn, P Weissbrod, M Yip
Fastron: An Online Learning-Based Model and Active Learning Strategy for Proxy Collision Detection
N. Das, N. Gupta, M. Yip
Variable-Stiffness Robot Orthosis enables Dynamic Activities in Limb-salvage Veterans
T. West, A. Lucas, R. Nayak, A. Liang, J. Collins, R. Miltenberger, T. Kingsbury, M. Wyatt, M. Yip
New adaptive scaling strategies lowers the barrier to telerobotic surgery in communication-delayed, far-forward environments
F. Richter, Z. Ye, W. Xu, A. Bamford, E. Wirtz, R. Orosco, S. Hong, M. Yip
Three-dimensional hysteresis compensation enhances accuracy of robotic artificial muscles
J. Zhang, A. Simeonov and M. C. Yip
Bundled Super-Coiled Polymer Artificial Muscles: Design, Characterization, and Modeling
A. Simeonov, T. Henderson, Z. Lan, G. Sundar, A. Factor, J. Zhang and M. C. Yip
Vision-based Force Feedback Estimation for Robot-assisted Surgery using Instrument-constrained Biomechanical 3D Maps
N. Haouchine, W. Kuang, S. Cotin, M.C. Yip
Autonomous Control of Continuum Robot Manipulators for Complex Cardiac Ablation Tasks
M. Yip, J. Sganga, D. Camarillo
Robot Control of Endoscopic Instruments using Flexible Polymer Sheath
Aaron Gunn, Mrinal Verghese, Wesly Wong, Phil Weissbrod, M. Yip
Screw-propelled endoscopic robot
Kevin Cheng, Andrew Saad, Dmitrii Votintcev, Elaine Tanaka, Michael Yip
Telesurgical Robotic Operative Network: Addressing signal latency in telesurgery with machine learning development using microsurgical platform
S. Hong, R. Orosco, M. Yip, S. Bevans, E. Wirtz, K. Groom, M. Tabata, J. Zhou, V. Divi, J. Robitschek, J. Sterbis, F. Holsinger.
Modeling and Inverse Compensation of Hysteresis in Supercoiled Polymer Artificial Muscles
J. Zhang, K. Iyer, A. Simeonov and M. C. Yip
Neural Path Planning: Fixed Time, Near-Optimal Path Generation via Oracle Imitation
M.J. Bency, A.H. Qureshi, M.C. Yip
An Instrumented Glove for Improving Spasticity Assessment
S. Padmaja, P. Jonnalagedda, F. Deng, K. Douglas, L. Chukoskie, M. Yip, T.N. Ng, T. Nguyen, A. Skalsky, H. Garudadri
WoodenHaptics: A Starting Kit for Crafting Force-Reflecting Spatial Haptic Devices
J. Forsslund, M. Yip and E-L. Sallnas
Finite Element Simulation of Brain Deformation from Six Degree of Freedom Acceleration Measurements of Mild Traumatic Brain Injury
F. Hernandez, L. Wu, M. Yip, A. Hoffman, J. Lopez, G. Grant, S. Kleiven and D. Camarillo
Linear and Rotational Measurements of Human Mild Traumatic Brain Injury
F. Hernandez, L. Wu, M. Yip and D. Camarillo
Prediction of Human Mild Traumatic Brain Injury in Multiple Dimensions
M. Yip*, L. Wu*, F. Hernandez, J. Schooler, K. Bui, B. Hammoor, E. Ortega, G. Yock, J. Lopez, A. Hoffman, G. Grant and D. Camarillo
Model-less Control of a Flexible Robotic Catheter | Best paper award.
M. Yip, P. Wang, and D. Camarillo
Six Degree of Freedom Measurements of Human Mild Traumatic Brain Injury
F. Hernandez, L. Wu, M. Yip, A. Hoffman, J. Lopez, G. Grant, S. Kleiven and D. Camarillo
Model-less Feedback Control of Continuum Manipulators in Constrained Environments
M. Yip and D. Camarillo
Ultrasound-Based Image Guidance for Robot-Assisted Laparoscopic Radical Prostatectomy: Initial in-vivo results
O. Mohareri, C. Schneider, T. Adebar, M. Yip, P. Black, C. Nguan, D. Bergman, J. Seroger, S. DiMaio and S. Salcudean
Real-time Methods for Long-Term Tissue Feature Tracking in Endoscopic Scenes
M. Yip, D. Lowe, S. Salcudean, R. Rohling and C. Nguan
Registration of 3D Ultrasound through an Air–Tissue Boundary
T. Adebar, M. Yip, S. Salcudean, R. Rohling, C. Nguan and L. Goldenberg
Tissue Tracking and Registration for Image-Guided Surgery
M. Yip, D. Lowe, S. Salcudean, R. Rohling and C. Nguan
Performance Analysis of a Haptic Telemanipulation Task under Time Delay
M. Yip, M. Tavakoli and R. Howe
Indirect Low-Intensity Ultrasonic Stimulation for Tissue Engineering
H. Park, M. Yip, J. Kost, J. Kobler, R. Langer, S. Zeitels and B. Chertok
Performance Analysis of a Manipulation Task in Time-Delayed Teleoperation
M. Yip, M. Tavakoli and R. Howe
3D Ultrasound to Stereoscopic Camera Registration through an Air-Tissue Boundary
Proc. Medical Image Computing and Computer-Assisted Intervention (MICCAI), Lecture Notes in Computer Science, no. 6362, pp. 626-634, 2010.
M. Yip, T. Adebar, R. Rohling, S. Salcudean and C. Nguan
Robotic Force Stabilization for Beating Heart Intracardiac Surgery
S. Yuen, M. Yip, N. Vasilyev, D. Perrin, P. del Nido and R. Howe
Intra-operative Laryngoscopic Instrument for Characterizing Vocal Fold Viscoelasticity
M. Ottensmeyer, M. Yip, C. Walsh, J. Kobler, J. Heaton, and S. Zeitels