Crane: a 10 degree-of-freedom, tele-surgical system for dexterous manipulation within imaging bores
Publications category: image-guided-surgery
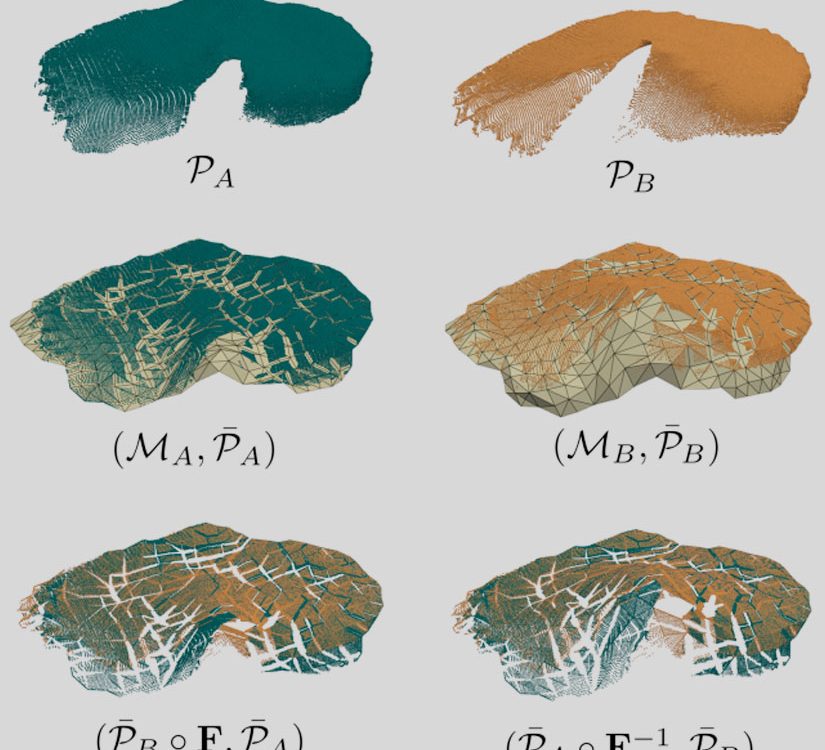
SuPerPM: A Large Deformation-Robust Surgical Perception Framework Based on Deep Point Matching Learned from Physical Constrained Simulation Data
2024
Accepted in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024.
Read more
SURESTEP: An Uncertainty-Aware Trajectory Optimization Framework to Enhance Visual Tool Tracking for Robust Surgical Automation
2024
Accepted in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024.
Read more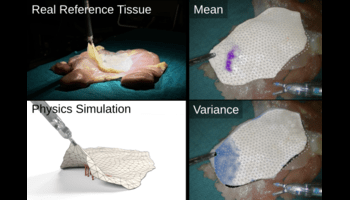
JIGGLE: An Active Sensing Framework for Boundary Parameters Estimation in Deformable Surgical Environments
2024
Accepted in Robotics: Science and Systems (RSS), 2024.
Read moreArtificial intelligence meets medical robotics
2023
Science 381 (6654), pp. 141-146 (2023).
Read more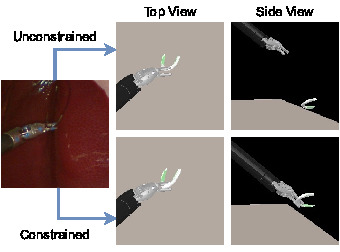
Real-Time Constrained 6D Object-Pose Tracking of An In-Hand Suture Needle for Minimally Invasive Robotic Surgery
2023
IEEE International Conference on Robotics and Automation (ICRA), pp. 4761-4767 (2023).
Read more
Image-based Pose Estimation and Shape Reconstruction for Robot Manipulators and Soft, Continuum Robots via Differentiable Rendering
2023
IEEE International Conference on Robotics and Automation (ICRA), pp. 560-567 (2023).
Read more
ORRN: An ODE-based Recursive Registration Network for Deformable Respiratory Motion Estimation With Lung 4DCT Images
2023
IEEE Transactions on Biomedical Engineering, 70(12), pp.3265-3276 (2023).
Read moreRobotic Tool Tracking under Partially Visible Kinematic Chain: A Unified Approach
F. Richter, J. Lu, R. K. Orosco, M. C. Yip
Read moreCrane: a 10 degree-of-freedom, tele-surgical system for dexterous manipulation within imaging bores
D Schreiber, Z Yu, H Jiang, T Henderson, G Li, J Yu, R Zhu, AM Norbash, MC Yip
Read moreAutonomous Robotic Suction to Clear the Surgical Field for Hemostasis using Image-based Blood Flow Detection
F. Richter, S. Shen, F. Liu, J. Huang, E.K. Funk, R.K. Orosco, M.C. Yip
Read moreSuPer Deep: A Surgical Perception Framework for Robotic Tissue Manipulation using Deep Learning for Feature Extraction
J. Lu, A. Jayakumari, F. Richter, Y. Li, M.C. Yip
Read moreARTEMIS: A Collaborative Mixed-Reality System for Immersive Surgical Telementoring
D Gasques, JG Johnson, T Sharkey, Y Feng, R Wang, ZR Xu, E Zavala, Y. Zhang, W. Xie, X. Zhang, K. Davis, M. Yip, and N. Weibel
Read moreCRANE: a 10 Degree-of-Freedom, Tele-surgical System for Dexterous Manipulation within Imaging Bores
DA Schreiber, Z Yu, H Jiang, T Henderson, G Li, J Yu, R Zhu, AM Norbash, MC Yip
Read moreSuPer: A Surgical Perception Framework for Endoscopic Tissue Manipulation with Surgical Robotics
Y Li, F Richter, J Lu, EK Funk, RK Orosco, J Zhu, MC Yip
Read moreCRANE: A highly dexterous needle placement robot for evaluation of interventional radiology procedures | Best Paper finalist
DA Schreiber, H Jiang, G Li, J Yu, Z Yu, R Zhu, AM Norbash, MC Yip
Read moreAn Open-Source 7-Axis, Robotic Platform to Enable Dexterous Procedures within CT Scanners
D. A. Schreiber, D. B. Shak, A. M. Norbash, M. C. Yip
Read moreModel-free Visual Control for Continuum Robot Manipulators via Orientation Adaptation
M Verghese, F Richter, A Gunn, P Weissbrod, M Yip
Read moreVision-based Force Feedback Estimation for Robot-assisted Surgery using Instrument-constrained Biomechanical 3D Maps
N. Haouchine, W. Kuang, S. Cotin, M.C. Yip
Read moreUltrasound-Based Image Guidance for Robot-Assisted Laparoscopic Radical Prostatectomy: Initial in-vivo results
O. Mohareri, C. Schneider, T. Adebar, M. Yip, P. Black, C. Nguan, D. Bergman, J. Seroger, S. DiMaio and S. Salcudean
Read moreReal-time Methods for Long-Term Tissue Feature Tracking in Endoscopic Scenes
M. Yip, D. Lowe, S. Salcudean, R. Rohling and C. Nguan
Read moreRegistration of 3D Ultrasound through an Air–Tissue Boundary
T. Adebar, M. Yip, S. Salcudean, R. Rohling, C. Nguan and L. Goldenberg
Read moreTissue Tracking and Registration for Image-Guided Surgery
M. Yip, D. Lowe, S. Salcudean, R. Rohling and C. Nguan
Read more3D Ultrasound to Stereoscopic Camera Registration through an Air-Tissue Boundary
M. Yip, T. Adebar, R. Rohling, S. Salcudean and C. Nguan
Read moreRobotic Force Stabilization for Beating Heart Intracardiac Surgery
S. Yuen, M. Yip, N. Vasilyev, D. Perrin, P. del Nido and R. Howe
Read more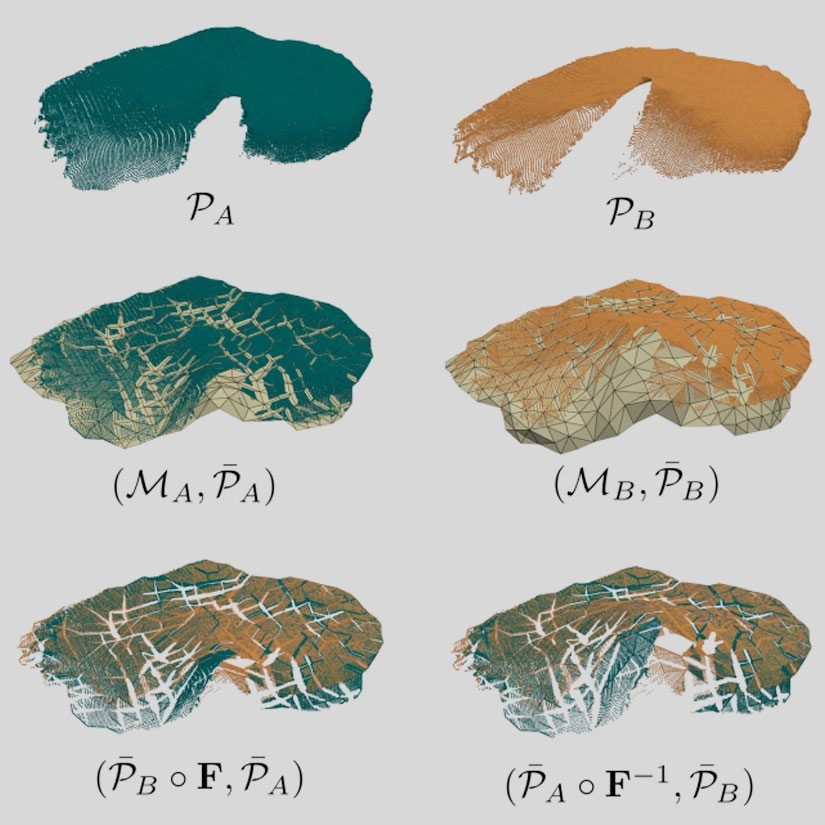
SuPerPM: A Large Deformation-Robust Surgical Perception Framework Based on Deep Point Matching Learned from Physical Constrained Simulation Data
Accepted in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024.
SURESTEP: An Uncertainty-Aware Trajectory Optimization Framework to Enhance Visual Tool Tracking for Robust Surgical Automation
Accepted in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024.
JIGGLE: An Active Sensing Framework for Boundary Parameters Estimation in Deformable Surgical Environments
Accepted in Robotics: Science and Systems (RSS), 2024.
Real-Time Constrained 6D Object-Pose Tracking of An In-Hand Suture Needle for Minimally Invasive Robotic Surgery
IEEE International Conference on Robotics and Automation (ICRA), pp. 4761-4767 (2023).
Image-based Pose Estimation and Shape Reconstruction for Robot Manipulators and Soft, Continuum Robots via Differentiable Rendering
IEEE International Conference on Robotics and Automation (ICRA), pp. 560-567 (2023).
ORRN: An ODE-based Recursive Registration Network for Deformable Respiratory Motion Estimation With Lung 4DCT Images
IEEE Transactions on Biomedical Engineering, 70(12), pp.3265-3276 (2023).
Robotic Tool Tracking under Partially Visible Kinematic Chain: A Unified Approach
F. Richter, J. Lu, R. K. Orosco, M. C. Yip
Differentiable Robotic Manipulation of Deformable Rope-like Objects Using Compliant Position-based Dynamics
F Liu, E Su, J Lu, M Li, MC Yip
Crane: a 10 degree-of-freedom, tele-surgical system for dexterous manipulation within imaging bores
D Schreiber, Z Yu, H Jiang, T Henderson, G Li, J Yu, R Zhu, AM Norbash, MC Yip