Robotic manipulation of deformable rope-like objects using differentiable compliant position-based dynamics
Publications category: deformable-modeling-and-manipulation
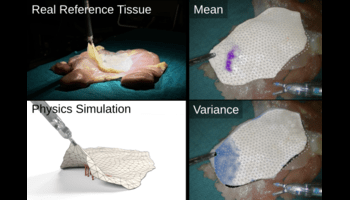
JIGGLE: An Active Sensing Framework for Boundary Parameters Estimation in Deformable Surgical Environments
2024
Accepted in Robotics: Science and Systems (RSS), 2024.
Read more
Achieving Autonomous Cloth Manipulation with Optimal Control via Differentiable Physics-Aware Regularization and Safety Constraints
2024
Accepted in IEEE International Conference on Robotics and Automation (ICRA), 2024.
Read more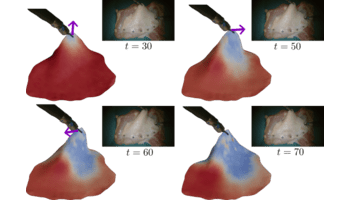
Real-to-Sim Deformable Object Manipulation: Optimizing Physics Models with Residual Mappings for Robotic Surgery
2024
Accepted in IEEE International Conference on Robotics and Automation (ICRA), 2024.
Read moreObject-centric Representations for Interactive Online Learning with Non-Parametric Methods
2023
IEEE International Conference on Automation Science and Engineering (CASE), pp. 1-6 (2023).
Read moreArtificial intelligence meets medical robotics
2023
Science 381 (6654), pp. 141-146 (2023).
Read more
Suture Thread Spline Reconstruction from Endoscopic Images for Robotic Surgery with Reliability-driven Keypoint Detection
2023
IEEE International Conference on Robotics and Automation (ICRA), pp. 4747-4753 (2023).
Read more
Image-based Pose Estimation and Shape Reconstruction for Robot Manipulators and Soft, Continuum Robots via Differentiable Rendering
2023
IEEE International Conference on Robotics and Automation (ICRA), pp. 560-567 (2023).
Read more
Semantic-SuPer: A Semantic-aware Surgical Perception Framework for Endoscopic Tissue Identification, Reconstruction, and Tracking
2023
IEEE International Conference on Robotics and Automation (ICRA), pp. 4739-4746 (2023).
Read more
ORRN: An ODE-based Recursive Registration Network for Deformable Respiratory Motion Estimation With Lung 4DCT Images
2023
IEEE Transactions on Biomedical Engineering, 70(12), pp.3265-3276 (2023).
Read moreRobotic manipulation of deformable rope-like objects using differentiable compliant position-based dynamics
2023
IEEE Robotics and Automation Letters, vol. 8, no. 7, pp. 3964-3971 (2023).
Read moreImage Based Reconstruction of Liquids from 2D Surface Detections
F Richter, RK Orosco, MC Yip
Read moreArtifacts Mitigation in Sensors for Spasticity Assessment
Ç Yalçın, M Sam, Y Bu, M Amit, AJ Skalsky, M Yip, TN Ng, H Garudadri
Read moreCompensatory motion scaling for time-delayed robotic surgery
R.K. Orosco, B. Lurie, T. Matsuzaki, E.K. Funk, V. Divi, F.C. Holsinger, S. Hong, F. Richter, N. Das, M. C. Yip
Read moreAutonomous Robotic Suction to Clear the Surgical Field for Hemostasis using Image-based Blood Flow Detection
F. Richter, S. Shen, F. Liu, J. Huang, E.K. Funk, R.K. Orosco, M.C. Yip
Read moreSuPer Deep: A Surgical Perception Framework for Robotic Tissue Manipulation using Deep Learning for Feature Extraction
J. Lu, A. Jayakumari, F. Richter, Y. Li, M.C. Yip
Read moreReal-to-Sim Registration of Deformable Soft-Tissue with Position-Based Dynamics for Surgical Robot Autonomy
F. Liu, Z. Li, Y. Han, J. Lu, F. Richter, M.C. Yip
Read moreSuPer: A Surgical Perception Framework for Endoscopic Tissue Manipulation with Surgical Robotics
Y Li, F Richter, J Lu, EK Funk, RK Orosco, J Zhu, MC Yip
Read moreVision-based Force Feedback Estimation for Robot-assisted Surgery using Instrument-constrained Biomechanical 3D Maps
N. Haouchine, W. Kuang, S. Cotin, M.C. Yip
Read moreIntra-operative Laryngoscopic Instrument for Characterizing Vocal Fold Viscoelasticity
M. Ottensmeyer, M. Yip, C. Walsh, J. Kobler, J. Heaton, and S. Zeitels
Read moreJIGGLE: An Active Sensing Framework for Boundary Parameters Estimation in Deformable Surgical Environments
Accepted in Robotics: Science and Systems (RSS), 2024.
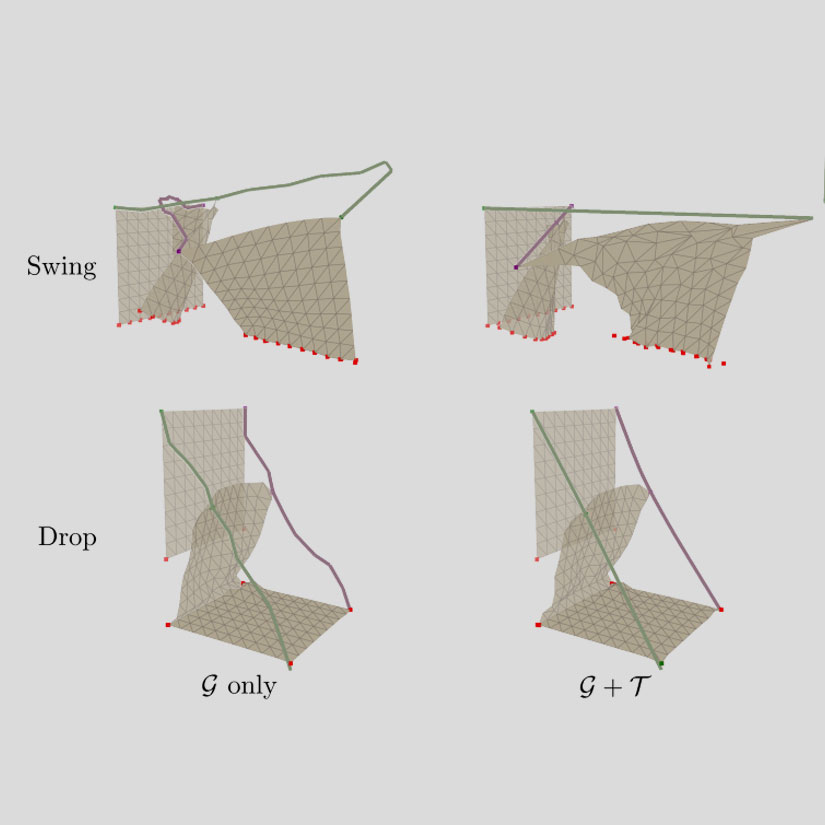
Achieving Autonomous Cloth Manipulation with Optimal Control via Differentiable Physics-Aware Regularization and Safety Constraints
Accepted in IEEE International Conference on Robotics and Automation (ICRA), 2024.
Real-to-Sim Deformable Object Manipulation: Optimizing Physics Models with Residual Mappings for Robotic Surgery
Accepted in IEEE International Conference on Robotics and Automation (ICRA), 2024.
Object-centric Representations for Interactive Online Learning with Non-Parametric Methods
IEEE International Conference on Automation Science and Engineering (CASE), pp. 1-6 (2023).

Suture Thread Spline Reconstruction from Endoscopic Images for Robotic Surgery with Reliability-driven Keypoint Detection
IEEE International Conference on Robotics and Automation (ICRA), pp. 4747-4753 (2023).
Image-based Pose Estimation and Shape Reconstruction for Robot Manipulators and Soft, Continuum Robots via Differentiable Rendering
IEEE International Conference on Robotics and Automation (ICRA), pp. 560-567 (2023).
Semantic-SuPer: A Semantic-aware Surgical Perception Framework for Endoscopic Tissue Identification, Reconstruction, and Tracking
IEEE International Conference on Robotics and Automation (ICRA), pp. 4739-4746 (2023).
ORRN: An ODE-based Recursive Registration Network for Deformable Respiratory Motion Estimation With Lung 4DCT Images
IEEE Transactions on Biomedical Engineering, 70(12), pp.3265-3276 (2023).
Robotic manipulation of deformable rope-like objects using differentiable compliant position-based dynamics
IEEE Robotics and Automation Letters, vol. 8, no. 7, pp. 3964-3971 (2023).