We develop machine learning and motion planning algorithms that push the limits of control and autonomous behavior on three fronts:
1Dexterity
2Agility
3Precision
This approach allows an artificial intelligence and a control strategy for robots to effectively learn to behave appropriate in a realistic environment, whether it is in a robot-human factory, in a home, or in an operating room.
Active Projects
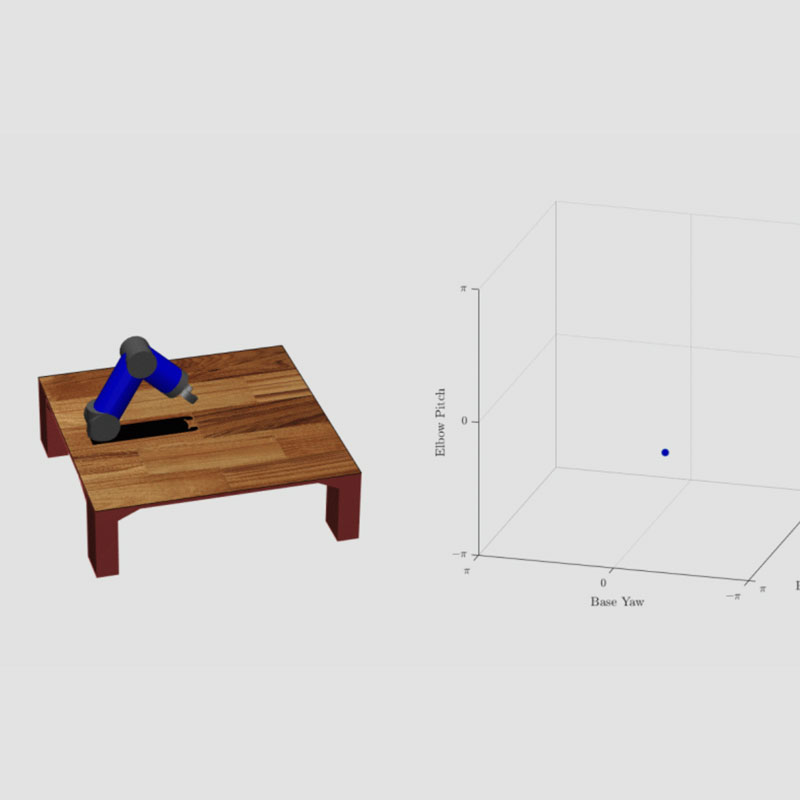
Machine-Learning for Collision Detection

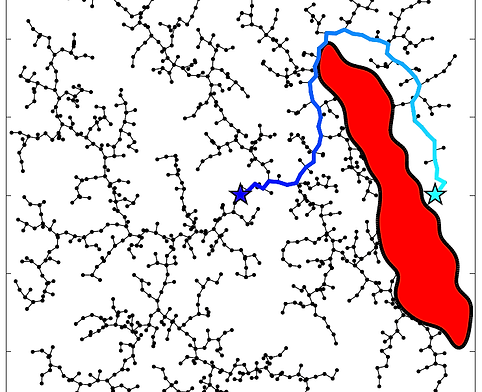
Neural Motion Planning
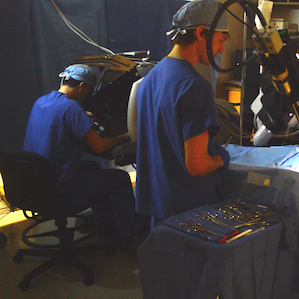
Learning to Automate Surgery

Scalable Reinforcement Learning