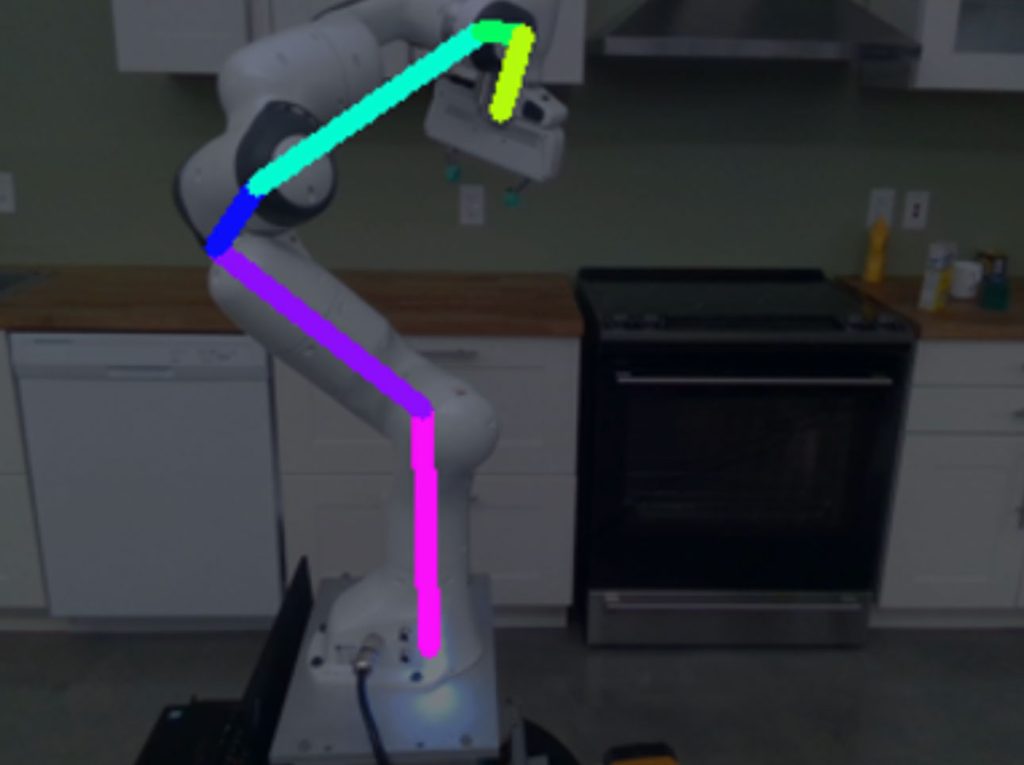
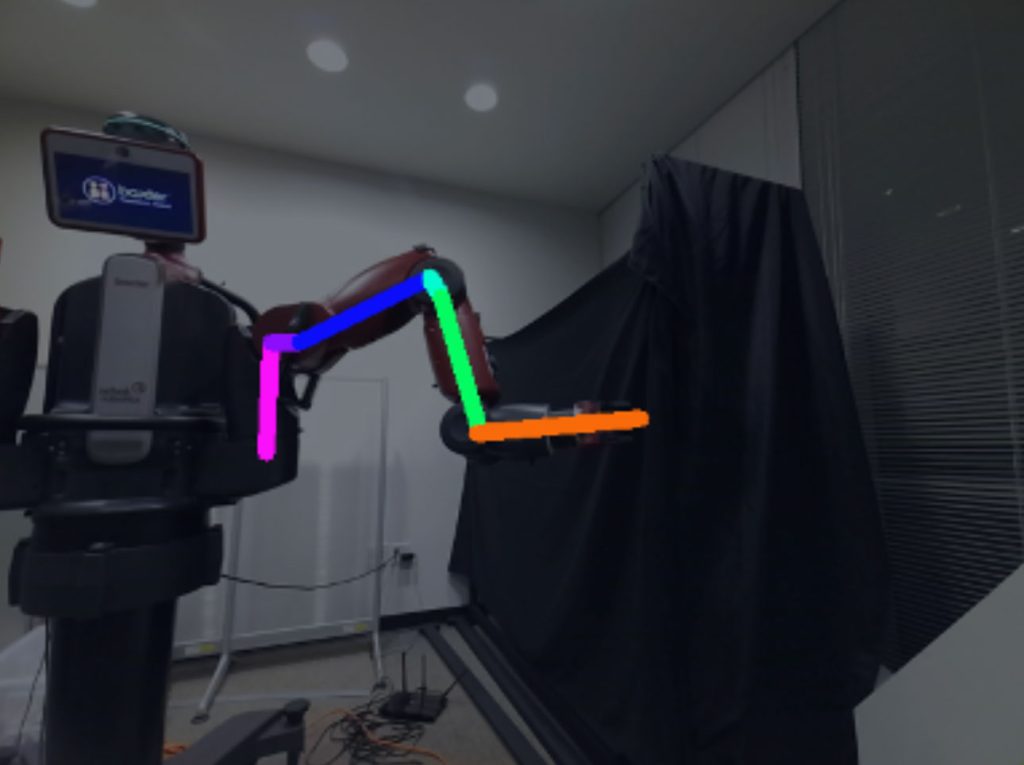
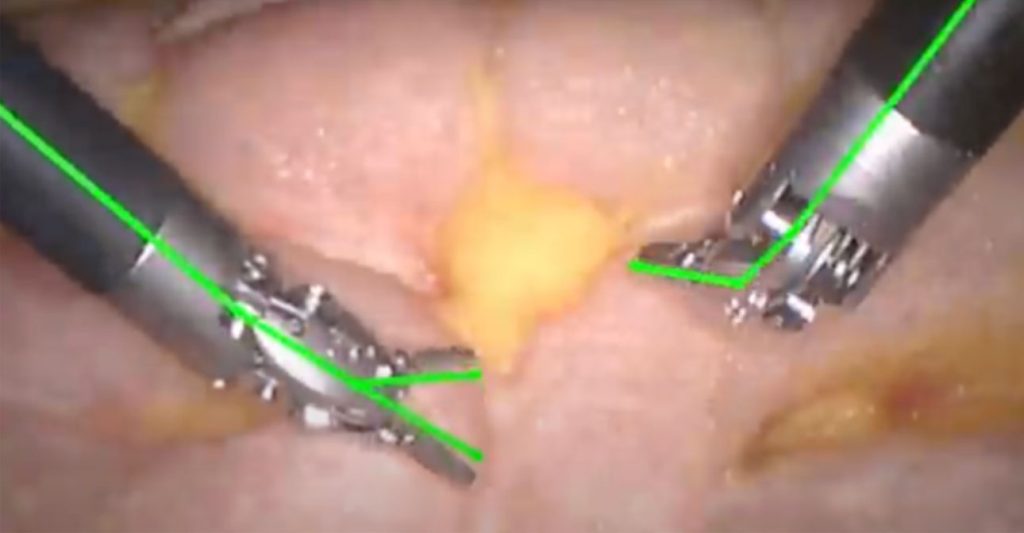
Robot Pose Estimation
Solving the robot pose is a fundamental requirement for vision-based robot control, and is a process that takes considerable effort and care to make accurate. Traditional approaches require modification of the robot via markers, and subsequent deep learning approaches enabled markerless feature extraction. In this project, we utilize advanced computer vision and robot state estimation techniques for estimating the robot's pose in dynamic environments. We focus on tracking the pose of various robots, including robot manipulators, surgical robots, and snake robots.
Students & Collaborators
- Jingpei Lu
- Shan Lin
- Florian Richter
- Lucas Liang
- Tristin Xie
Publications
An Instrumented Glove for Improving Spasticity Assessment
S. Padmaja, P. Jonnalagedda, F. Deng, K. Douglas, L. Chukoskie, M. Yip, T.N. Ng, T. Nguyen, A. Skalsky, H. Garudadri
WoodenHaptics: A Starting Kit for Crafting Force-Reflecting Spatial Haptic Devices
J. Forsslund, M. Yip and E-L. Sallnas
Intra-operative Laryngoscopic Instrument for Characterizing Vocal Fold Viscoelasticity
M. Ottensmeyer, M. Yip, C. Walsh, J. Kobler, J. Heaton, and S. Zeitels