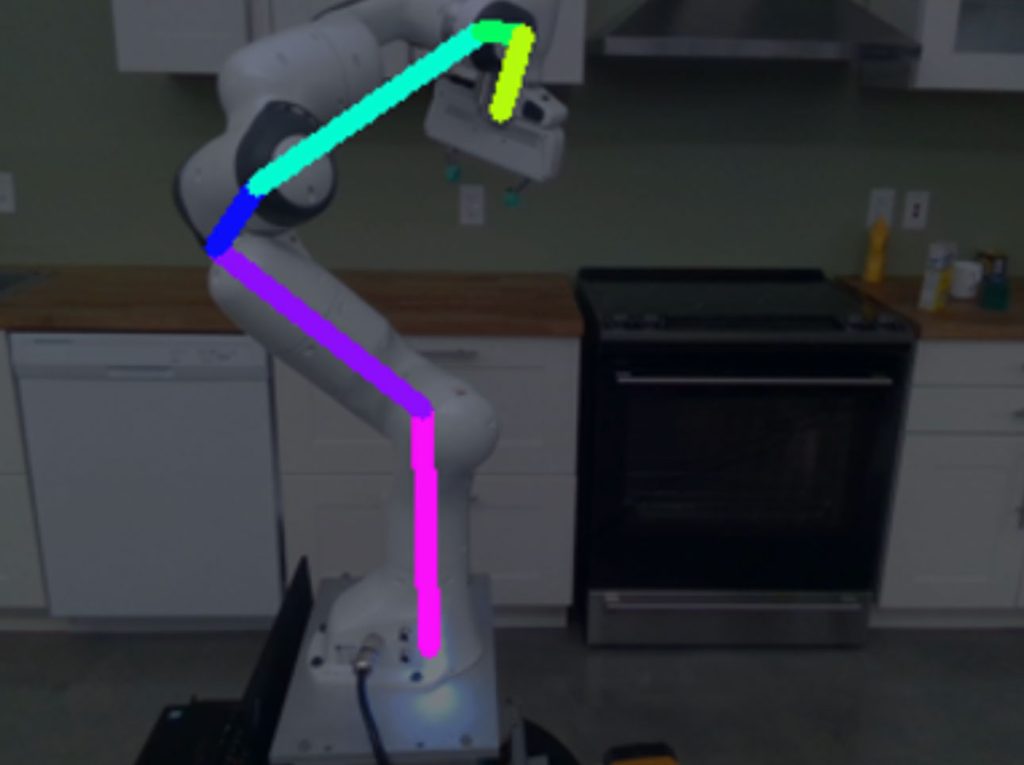
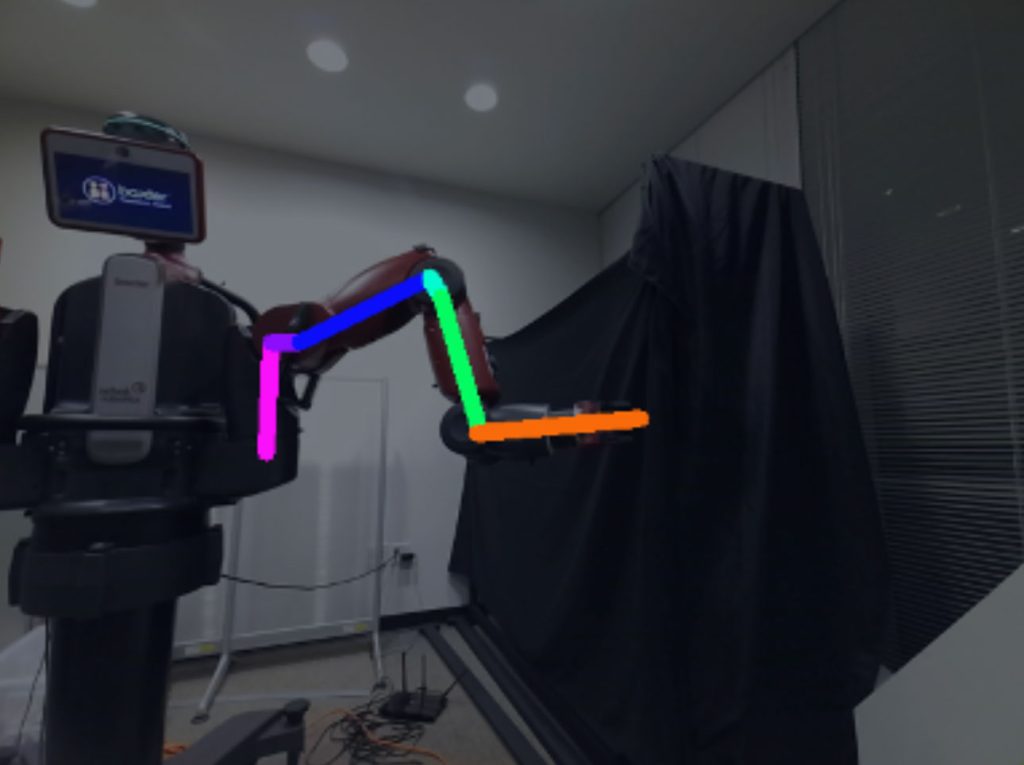
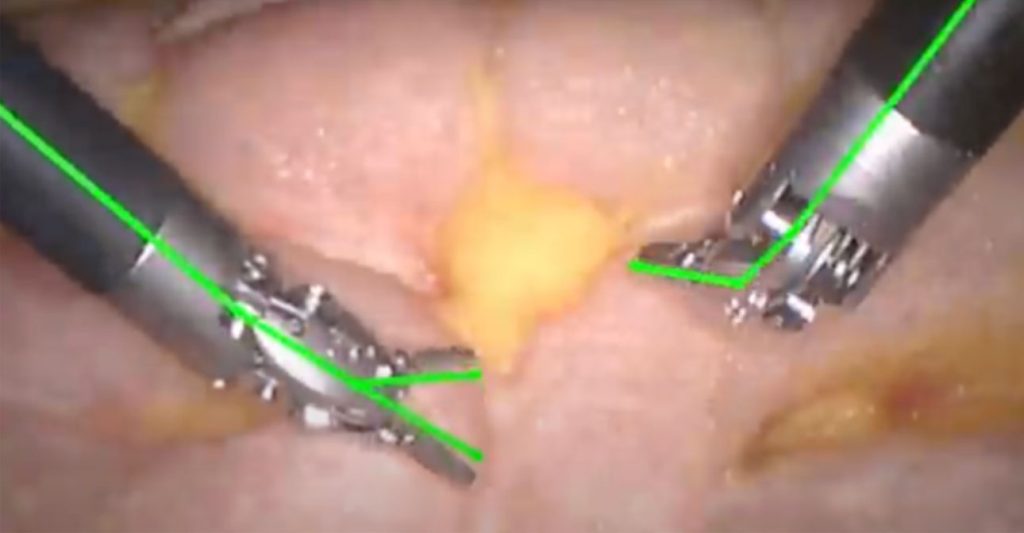
Robot Pose Estimation
Solving the robot pose is a fundamental requirement for vision-based robot control, and is a process that takes considerable effort and care to make accurate. Traditional approaches require modification of the robot via markers, and subsequent deep learning approaches enabled markerless feature extraction. In this project, we utilize advanced computer vision and robot state estimation techniques for estimating the robot's pose in dynamic environments. We focus on tracking the pose of various robots, including robot manipulators, surgical robots, and snake robots.
Students & Collaborators
- Jingpei Lu
- Shan Lin
- Florian Richter
- Lucas Liang
- Tristin Xie
Publications
Vibration-based Multi-Axis Force Sensing: Design, Characterization, and Modeling
W. Kuang, M.C. Yip, J. Zhang
Augmented Reality Predictive Displays to Help Mitigate the Effects of Delayed Telesurgery
F. Richter, Y.F. Zhang, Y.H. Zhi, R.K. Orosco, M.C. Yip
Variable-Stiffness Robot Orthosis enables Dynamic Activities in Limb-salvage Veterans
T. West, A. Lucas, R. Nayak, A. Liang, J. Collins, R. Miltenberger, T. Kingsbury, M. Wyatt, M. Yip
Bundled Super-Coiled Polymer Artificial Muscles: Design, Characterization, and Modeling
A. Simeonov, T. Henderson, Z. Lan, G. Sundar, A. Factor, J. Zhang and M. C. Yip
Robot Control of Endoscopic Instruments using Flexible Polymer Sheath
Aaron Gunn, Mrinal Verghese, Wesly Wong, Phil Weissbrod, M. Yip
Screw-propelled endoscopic robot
Kevin Cheng, Andrew Saad, Dmitrii Votintcev, Elaine Tanaka, Michael Yip
Modeling and Inverse Compensation of Hysteresis in Supercoiled Polymer Artificial Muscles
J. Zhang, K. Iyer, A. Simeonov and M. C. Yip