Rescueing Rhino with Robotics
In-Vitro Fertilization (IVF) often represents the only controllable strategy for keeping alive many species that are critically endangered, including the majestic Northern White Rhino. When the last remaining male died in March 2018, the two female rhinos left alive remain as the only survivors of its species, and will inevitably be extinct within the next 10 years. These creatures will follow many others before and after them in which in-situ conservation and anti-poaching efforts have failed to recover their populations.
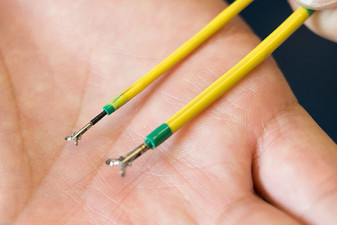
For rhinos, IVF is challenged by the logistical inability to deposit sperm through the cervix into the uterine horn safely due to the cervix’s many compact folds and twists. Although a transvaginal approach is the most trauma-free, the complex cervix limits access with current instrumentation. A transcutaneous approach involving piercing the hide of the rhino produce significant trauma and potential infections that make it a poor option.
Our goal is to develop robots that can, through robot-delivered IVF, return the Northern White Rhinos it back from extinction. We been developing snake-like robots (i.e. robotic catheter) for years that creep into natural orifices and vasculatures of the human body, and that have made it safe for doctors to access deep anatomical structures through natural orifices. The same technologies have never been considered for use in treating or helping animals, but functionally offer a potentially transformative approach to conservation efforts. Our goal towards realizing the first robot-assisted live-birth of an animal species, and coinciding with the first robot-assisted return of an extinct species.
This project is in direct collaboration with the San Diego Conservatory's Rhino Rescue Center.
Students & Collaborators
- Harleen Singh
- Mrinal Verghese
Media Coverage


Publications
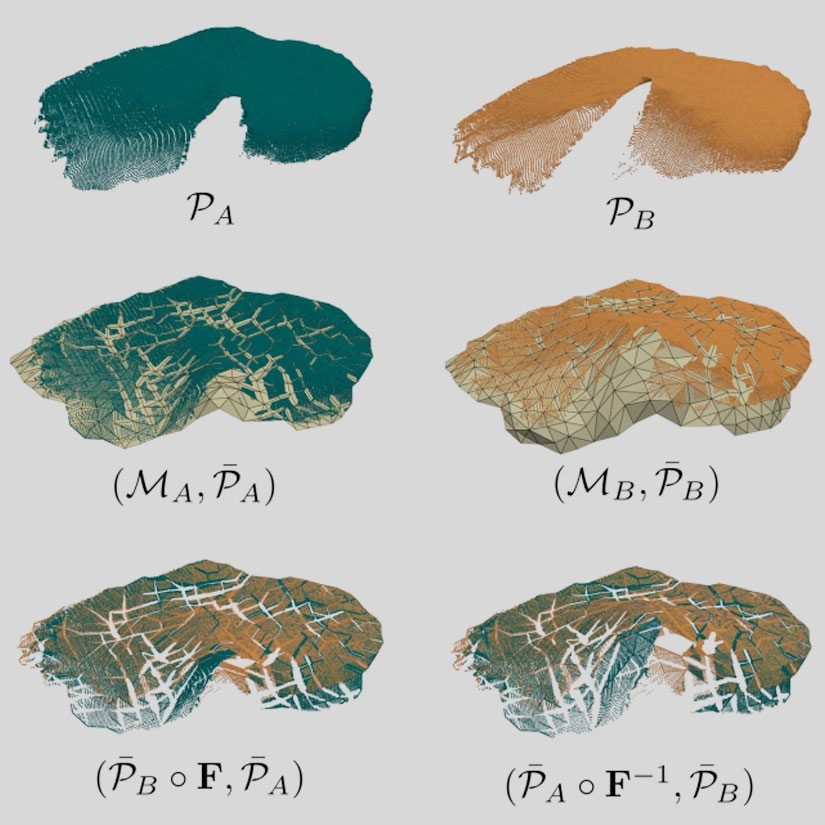
SuPerPM: A Large Deformation-Robust Surgical Perception Framework Based on Deep Point Matching Learned from Physical Constrained Simulation Data
Accepted in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024.
Mobility Analysis of Screw-Based Locomotion and Propulsion in Various Media
IEEE International Conference on Robotics and Automation (ICRA), pp. 7317-7323 (2023).
Design and Mechanics of Cable-Driven Rolling Diaphragm Transmission for High-Transparency Robotic Motion
IEEE International Conference on Robotics and Automation (ICRA), pp. 7338-7344 (2023).
Mobility Analysis of Screw-Based Locomotion and Propulsion in Various Media
IEEE International Conference on Robotics and Automation (ICRA), pp. 7317-7323 (2023).
Scalable tactile sensor arrays on flexible substrates with high spatiotemporal resolution enabling slip and grip for closed-loop robotics
H. Oh, G.C. Yi, M.C. Yip, S.A. Dayeh
Data-driven Actuator Selection for Artificial Muscle-Powered Robots
T. Henderson, Y. Zhi, A. Liu, M.C. Yip
ARCSnake: Reconfigurable Snake-Like Robot with Archimedean Screw Propulsion for Multi-Domain Mobility
F. Richter*, P. V. Gavrilov* and H. M. Lam* and A. Degani and M. C. Yip
Exobiology Extant Life Surveyor (EELS)
K Carpenter, A Thoesen, D Mick, J Martia, M Cable, K Mitchell, S. Hovsepian, J. Jasper, N. Georgiev, R. Thakker, A. Kourchians, B. Wilcox, M. Yip, and H. Marvi.
ARCSnake: An Archimedes' Screw-Propelled, Reconfigurable Robot Snake for Complex Environments
D.A. Schreiber*, F. Richter*, A. Bilan**, P.V. Gavrilov**, H. M. Lam**, C.H. Price**, K.C. Carpenter, M.C. Yip;