MRI/CT-compatible Robots
Perception and state estimation is a primary challenge in minimally invasive surgery (MIS). Real-time intra-operative Computed Tomography (CT) and Magnetic Resonance Imaging (MRI) provide global, actionable information to physicians without requiring line-of-sight to the anatomy. This information enables them to diagnose and operate on medical conditions with full contextual information.
Currently, both of these environments are very difficult to operate within due to their highly restrictive bore and safety constraints (radiation exposure and high magnetic fields for CT and MRI, respectively). In addition to the safety benefits, robotics will enable better patient outcomes by providing a more ergonomic User Interface to physicians.
We are developing a robotic platform for CT guided needle lung biopsy. The robot has an exo-bore backend and an intra-bore cable driven end effector for a significant collision free workspace. This platform is open-source and low cost to reproduce. Further development is being pursued to extend this robot to more general MIS applications, including catheter steering and endoscopic surgery.
We are additionally developing MRI compatible actuators using a 3D printable rolling diaphragm hydro-static transmission with a novel clutching mechanism. This will enable easy to use MRI compatible "motors" which retain the advantages and ease of control of traditional electric motors.
Students & Collaborators
- Dimitri Schrieber
- Alex Norbash
- Rebecca Theilmann




Publications

SURESTEP: An Uncertainty-Aware Trajectory Optimization Framework to Enhance Visual Tool Tracking for Robust Surgical Automation
Accepted in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024.
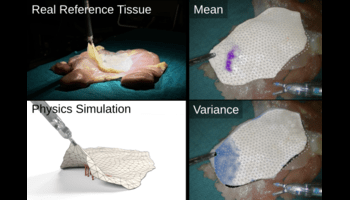
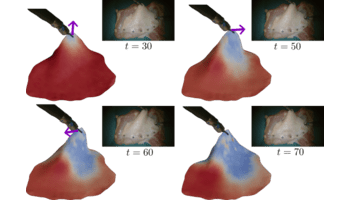
JIGGLE: An Active Sensing Framework for Boundary Parameters Estimation in Deformable Surgical Environments
Accepted in Robotics: Science and Systems (RSS), 2024.
Achieving Autonomous Cloth Manipulation with Optimal Control via Differentiable Physics-Aware Regularization and Safety Constraints
Accepted in IEEE International Conference on Robotics and Automation (ICRA), 2024.
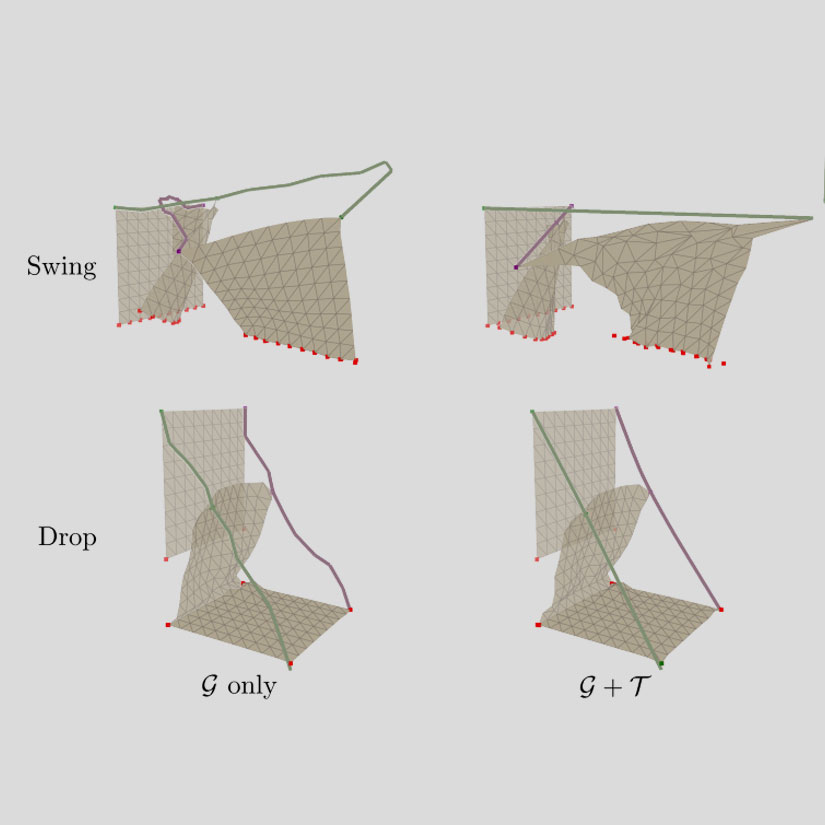
Real-to-Sim Deformable Object Manipulation: Optimizing Physics Models with Residual Mappings for Robotic Surgery
Accepted in IEEE International Conference on Robotics and Automation (ICRA), 2024.
AnyOKP: One-Shot and Instance-Aware Object Keypoint Extraction with Pretrained ViT
arXiv preprint arXiv:2309.08134.
Object-centric Representations for Interactive Online Learning with Non-Parametric Methods
IEEE International Conference on Automation Science and Engineering (CASE), pp. 1-6 (2023).

Suture Thread Spline Reconstruction from Endoscopic Images for Robotic Surgery with Reliability-driven Keypoint Detection
IEEE International Conference on Robotics and Automation (ICRA), pp. 4747-4753 (2023).
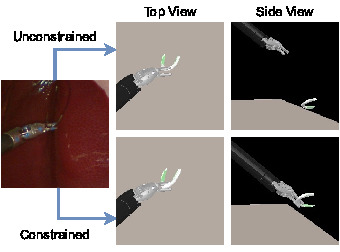
Real-Time Constrained 6D Object-Pose Tracking of An In-Hand Suture Needle for Minimally Invasive Robotic Surgery
IEEE International Conference on Robotics and Automation (ICRA), pp. 4761-4767 (2023).

Image-based Pose Estimation and Shape Reconstruction for Robot Manipulators and Soft, Continuum Robots via Differentiable Rendering
IEEE International Conference on Robotics and Automation (ICRA), pp. 560-567 (2023).