Machine Learning for Collision Detection
Motion planning, the task of determing a path for a robot from a start to a goal position while avoiding obstacles, is a requirement for almost all robot applications. For robots with many degrees-of-freedom, motion planning must be performed in complex, high-dimensional spaces. In these high-dimensional spaces, many feasible robot configurations are chained together to form a motion plan, requiring hundreds or thousands of costly collision checks.
Repeated collision checking is computationally expensive, taking up to 90% of modern motion planners’ computation time. Most motion planning researchers look into reducing the number of collision checks, but not much effort is expended into accelerating the collision checks themselves.
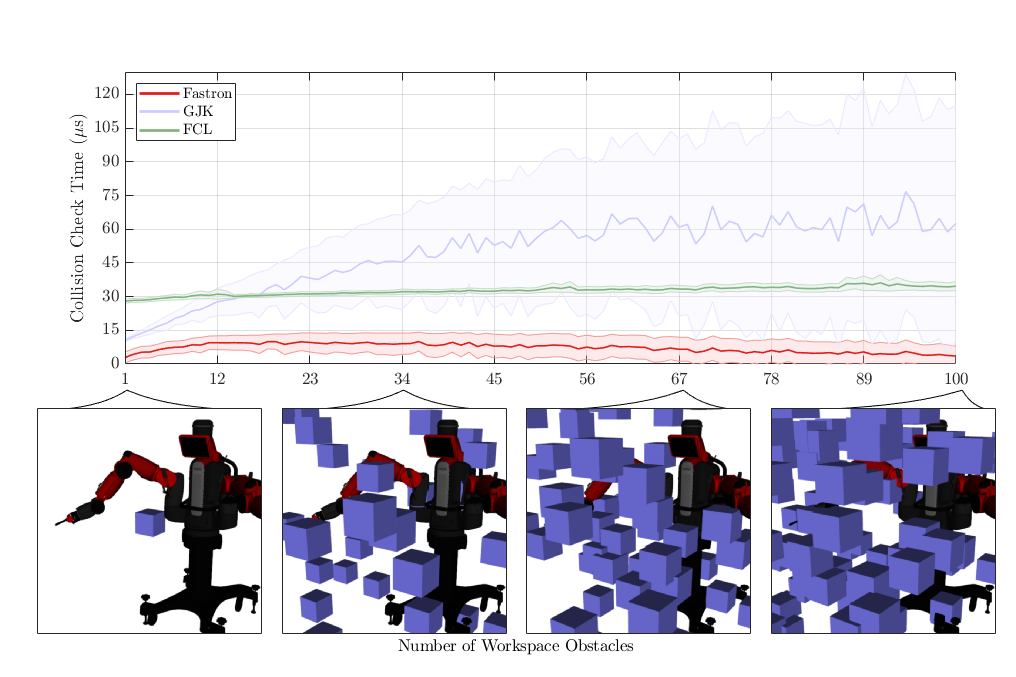
We investigate machine learning models that may be used as a fast proxy to standard collision checking paradigms. Our proxy collision detection algorithm, Fastron, accurately determines a robot’s collision status an order of magnitude faster than state-of-the-art collision checking methods, efficiently updates in response to a changing environment, and scales well with large numbers of collision objects. Current research investigates further speed and accuracy improvements, GPU parallelization, probability-of-collision predictions, new feature spaces, and collision-free configuration generator models.
Source code: http://www.github.com/ucsdarclab/fastron
Students & Collaborators
- Yuheng Zhi
- Nikhil Das
Publications
Remote telesurgery in humans: a systematic review
P Barba, J Stramiello, EK Funk, F Richter, MC Yip, and RK Orosco.
Mixed reality surgical mentoring of combat casualty care related procedures in a perfused cadaver model: Initial results of a randomized feasibility study
MD Tadlock, EJ Olson, D Gasques, R Champagne, MJ Krzyzaniak, SA Belverud, V Ravindra, J Kerns, PM Choi, J Deveraux, J Johnson, T Sharkey, M Yip, N Weibel, K Davis
ARTEMIS: A Collaborative Mixed-Reality System for Immersive Surgical Telementoring
D Gasques, JG Johnson, T Sharkey, Y Feng, R Wang, ZR Xu, E Zavala, Y. Zhang, W. Xie, X. Zhang, K. Davis, M. Yip, and N. Weibel
ARTEMIS: Mixed-Reality Environment for Immersive Surgical Telementoring
N. Weibel, D. Gasques, J. Johnson, T. Sharkey, Z.Q. Robin Xu, X.M. Zhang, M.C. Yip, K. Davis
ARTEMIS: Mixed-Reality Environment for Immersive Surgical Telementoring
N. Weibel, J. Johnson, T. Sharkey, Z. Robin Xu, E. Zavala, K. Davis, D. Gasques, X. Zhang, M.C. Yip
Three-dimensional hysteresis compensation enhances accuracy of robotic artificial muscles
J. Zhang, A. Simeonov and M. C. Yip
Vision-based Force Feedback Estimation for Robot-assisted Surgery using Instrument-constrained Biomechanical 3D Maps
N. Haouchine, W. Kuang, S. Cotin, M.C. Yip