AI for Remote Robotic Telesurgery
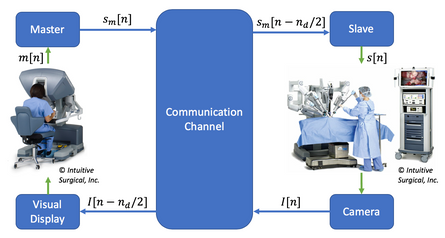
Robotic teleoperation brings great potential for advances within the field of surgery. The ability of a surgeon to reach patient remotely opens exciting opportunities. Early experience with telerobotic surgery has been interesting, but the clinical feasibility remains out of reach, largely due to the deleterious effects of communication delays. Teleoperation tasks are significantly impacted by unavoidable signal latency, which directly results in slower operations, less precision in movements, and increased human errors. Introducing significant changes to the surgical workflow, for example by introducing semi-automation or self-correction, present too significant a technological and ethical burden for commercial surgical robotic systems to adopt. We develop innovative solutions that reduce the risk of long distance operations while still giving the surgeon full control of the operation.
One solution is to give the operator immediate visual feedback of the surgeons motions by overlaying an Augmented Reality (AR) rendering a prediction of the operators move on the delayed video feed. This is also known as a predictive display. To realize this solution active tracking of the surgical robotic tools is required because relying on kinematic calibrations to localize the surgical robotic tools fails due to the millimeter scale of a surgical operation and the often utilized cable driven actuation. Also an adaptive transparency filter is utilized to prevents confusion arising from overlapping virtual and real visuals of the robot arms. The results from a user study with both experts and novices showed with statistical significance that using the predictive display decreased time to complete task while having no effect on error rates when operating under delay.
Another solution developed simply changes the scaling relationship between the surgeons motions in the master console and the patient side manipulators which hold the surgical robotic tools. We call this the motion scaling solution. Motion scaling has been shown to be an effective method of improving accuracy for surgeons when operating under normal conditions. We extend this idea to the remote telerobotic surgery and show that the motion scaling solutions reduces errors while having a minimal effect on time to complete tasks.
Students & Collaborators
- Florian Richter
- Zihyun Chiu
- Fei Liu
- Ryan Orosco
- Emily Funk
Publications
Remote telesurgery in humans: a systematic review
P Barba, J Stramiello, EK Funk, F Richter, MC Yip, and RK Orosco.
Mixed reality surgical mentoring of combat casualty care related procedures in a perfused cadaver model: Initial results of a randomized feasibility study
MD Tadlock, EJ Olson, D Gasques, R Champagne, MJ Krzyzaniak, SA Belverud, V Ravindra, J Kerns, PM Choi, J Deveraux, J Johnson, T Sharkey, M Yip, N Weibel, K Davis
ARTEMIS: A Collaborative Mixed-Reality System for Immersive Surgical Telementoring
D Gasques, JG Johnson, T Sharkey, Y Feng, R Wang, ZR Xu, E Zavala, Y. Zhang, W. Xie, X. Zhang, K. Davis, M. Yip, and N. Weibel
ARTEMIS: Mixed-Reality Environment for Immersive Surgical Telementoring
N. Weibel, D. Gasques, J. Johnson, T. Sharkey, Z.Q. Robin Xu, X.M. Zhang, M.C. Yip, K. Davis
ARTEMIS: Mixed-Reality Environment for Immersive Surgical Telementoring
N. Weibel, J. Johnson, T. Sharkey, Z. Robin Xu, E. Zavala, K. Davis, D. Gasques, X. Zhang, M.C. Yip
Three-dimensional hysteresis compensation enhances accuracy of robotic artificial muscles
J. Zhang, A. Simeonov and M. C. Yip
Vision-based Force Feedback Estimation for Robot-assisted Surgery using Instrument-constrained Biomechanical 3D Maps
N. Haouchine, W. Kuang, S. Cotin, M.C. Yip