Robot Pose Estimation
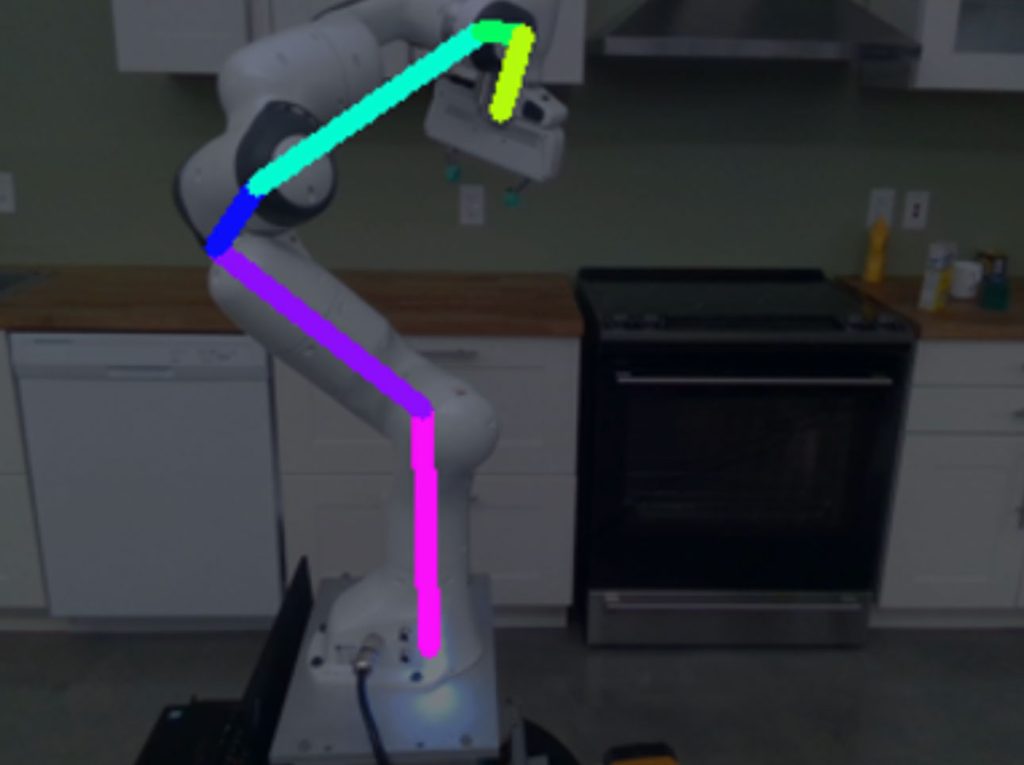
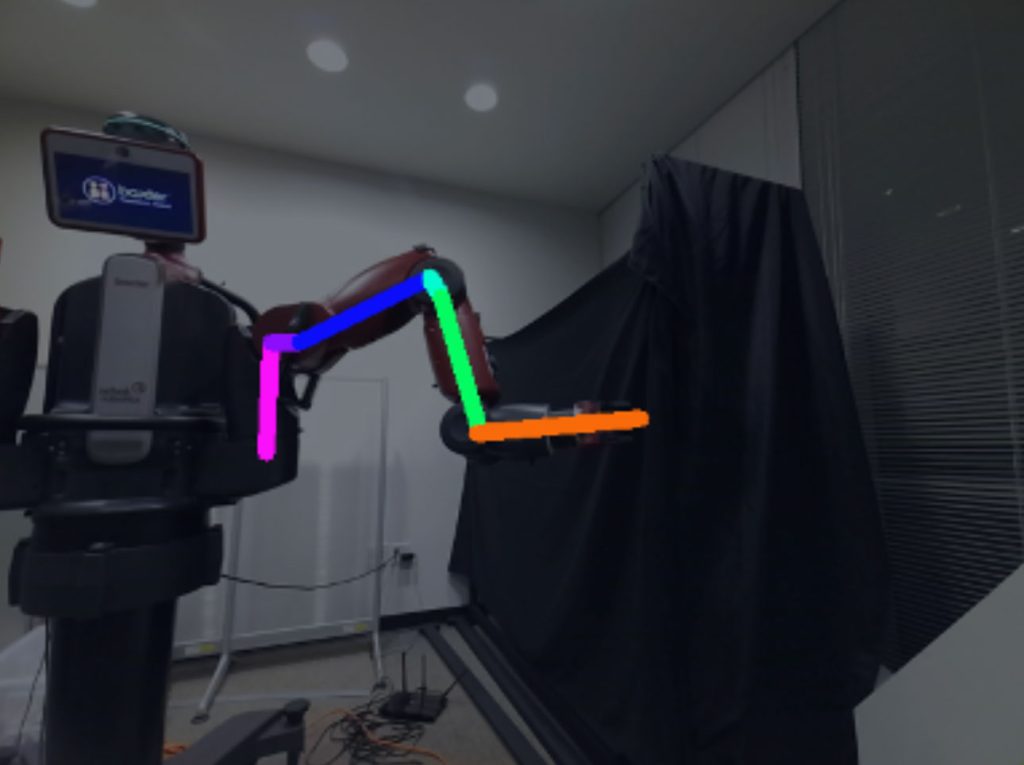
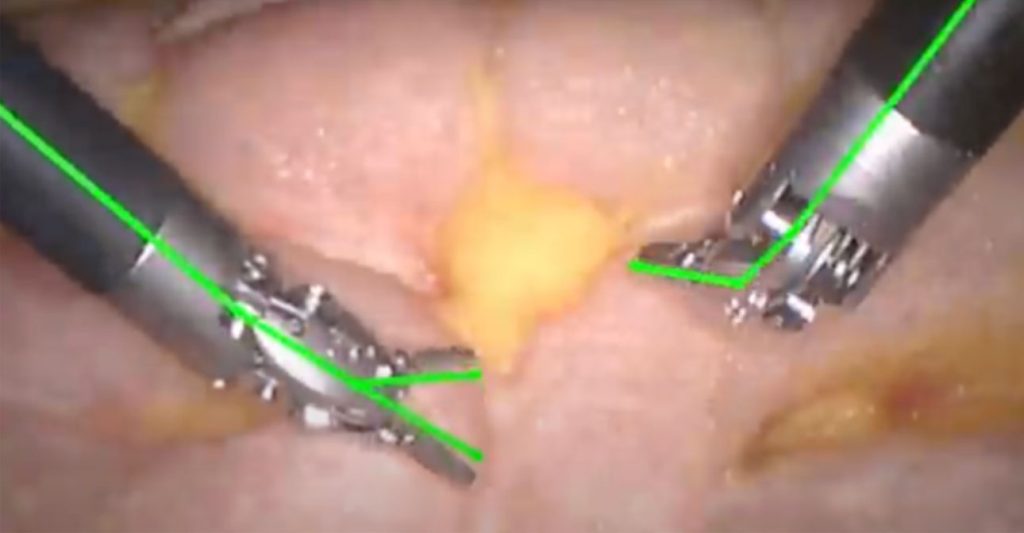
Solving the robot pose is a fundamental requirement for vision-based robot control, and is a process that takes considerable effort and care to make accurate. Traditional approaches require modification of the robot via markers, and subsequent deep learning approaches enabled markerless feature extraction. In this project, we utilize advanced computer vision and robot state estimation techniques for estimating the robot's pose in dynamic environments. We focus on tracking the pose of various robots, including robot manipulators, surgical robots, and snake robots.
Students & Collaborators
- Jingpei Lu
- Shan Lin
- Florian Richter
- Lucas Liang
- Tristin Xie
Publications
Mobility Analysis of Screw-Based Locomotion and Propulsion in Various Media
IEEE International Conference on Robotics and Automation (ICRA), pp. 7317-7323 (2023).
Design and Mechanics of Cable-Driven Rolling Diaphragm Transmission for High-Transparency Robotic Motion
IEEE International Conference on Robotics and Automation (ICRA), pp. 7338-7344 (2023).
Mobility Analysis of Screw-Based Locomotion and Propulsion in Various Media
IEEE International Conference on Robotics and Automation (ICRA), pp. 7317-7323 (2023).
Crane: a 10 degree-of-freedom, tele-surgical system for dexterous manipulation within imaging bores
D Schreiber, Z Yu, H Jiang, T Henderson, G Li, J Yu, R Zhu, AM Norbash, MC Yip
Scalable tactile sensor arrays on flexible substrates with high spatiotemporal resolution enabling slip and grip for closed-loop robotics
H. Oh, G.C. Yi, M.C. Yip, S.A. Dayeh
MPC-MPNet: Model-Predictive Motion Planning Networks for Fast, Near-Optimal Planning under Kinodynamic Constraints
L. Li, Y.L. Miao, A.H. Qureshi, M.C. Yip
Data-driven Actuator Selection for Artificial Muscle-Powered Robots
T. Henderson, Y. Zhi, A. Liu, M.C. Yip
ARCSnake: Reconfigurable Snake-Like Robot with Archimedean Screw Propulsion for Multi-Domain Mobility
F. Richter*, P. V. Gavrilov* and H. M. Lam* and A. Degani and M. C. Yip
Exobiology Extant Life Surveyor (EELS)
K Carpenter, A Thoesen, D Mick, J Martia, M Cable, K Mitchell, S. Hovsepian, J. Jasper, N. Georgiev, R. Thakker, A. Kourchians, B. Wilcox, M. Yip, and H. Marvi.
ARCSnake: An Archimedes' Screw-Propelled, Reconfigurable Robot Snake for Complex Environments
D.A. Schreiber*, F. Richter*, A. Bilan**, P.V. Gavrilov**, H. M. Lam**, C.H. Price**, K.C. Carpenter, M.C. Yip;